高人我知道焊接机器人的行动路线是人设定好的输入给机器人的程序
 邵雄瑶
邵雄瑶- 机器人
- 2026-06-20 10:16:03
- 80
写出工业机器人运动指令的直线位移指令和圆弧运动指令并写出其含义
工业机器人运动指令的直线位移指令和圆弧运动指令如下:直线位移指令:也叫线性运动,机器人工具中心点TCP从A点到B点,在两个点之间的路径轨迹始终保持为直线。所以线性运动常用于已知路径为直线的轨迹,如涂胶、焊接、切割等。圆弧运动指令:也叫弧线运动,需要机器人定三。
遥控机器人足球m3m4怎么编程
对于焊接机器人的行动路线,一般是人为设定好的一个路径后,输入给机器人的程序版存储器,权以控制不同的关节电机精确地动作一定角度。这样,根据机械和电气的联锁关系和程序的控制逻辑,机器人每执行一个动作都是从头到尾地执行相应的一段程序代码。包括:司服电机/步进电机转动。
在对工业机器人的进行线性运动时操作者的操作要点主要有哪些
在对工业机器人的进行线性运动时,操作者的操作要点主要包括:指定坐标系:在进行线性运动之前,需要指定坐标系,这包括大地坐标、基坐标、工具坐标和工件坐标。这些坐标系决定了TCP工具中心点在空间中的位置和运动路径。选择工具坐标系:选择合适的工具坐标系对于精确控制。
根据指令mhyk机器人在平面直角坐标系中能够完成下列动作
根据指令m,h,y=k,机器人在平面直角坐标系中的动作如下:先在原点向左m<;0或向右m>;0平移|m|个单位长度到达A点。再在A点向上h>;0或向下h<;0平移|h|个单位长度到达B点。最后跳到B点关于直线y=b或x=a的对称点C处。例如,若给机器人下了一个指令4,0,y=-3,则。
现需要驱动机器人手臂做直线运动请写出三种实现方案
运动指令大致可以分为三种,Joint是关节运动指令;Linear是直线运动指令;Circular是圆弧运动指令。Joint主要是指定fanuc在指定的两个点之间进行任意的运动;Linear主要是指定fanuc在指定的两个点之间进行直线运动;Circular主要是指定fanuc在制定的三个点之间进行圆弧运动。

工业机器人一般如何分类
编程输入型机器人通过通信方式接收预编写的程序,而示教输入型机器人则通过手动控制器或直接领动执行机构进行示教。按运动坐标形式分。而液压机器人则适用于需要大力矩和高强度的作业环境。按应用领域分类:工业机器人还可以根据其应用领域进行分类,如焊接机器人、装配。
机器人焊接完后夹具不会自动松开怎么回事
以下是机器人焊接完后夹具不会自动松开的可能原因:电磁阀未接好:检查通往PLC的线路,有可能PLC没有收到信号。PLC无信号输入输出:检查PLC是否有信号输入输出。程序问题:程序里面,焊接完成后如果没有信号输出,需要检查程序设置。综上所述,可能是电磁阀未接好、PLC无。
工业机器人主要部件组成有哪些
适用于连续焊接和涂装等作业。工业机器人按程序输入方式区分有编程输入型和示教输入型两类。编程输入型是将计算机上已编好的作业程序文件,通过RS232串口或者以太网等通信方式传送到机器人控制柜。示教输入型的示教方法有两种:一种是由操作者用手动控制器示教操纵盒,将。
PCB工业机器人设备性能有哪些
适用于连续焊接和涂装等作业。③按程序输入方式区分有编程输入型和示教输入型两类。编程输入型是将计算机上已编好的作业程序文件,通过RS232串口或者以太网等通信方式传送到机器人控制柜。示教输入型的示教方法有两种:一种是由操作者用手动控制器示教操纵盒,将指令信。
工业机器人应用编程的过度点有哪些
适用于连续焊接和涂装等作业。工业机器人按程序输入方式区分有编程输入型和示教输入型两类。编程输入型是将计算机上已编好的作业程序文件,通过RS232串口或者以太网等通信方式传送到机器人控制柜。示教输入型的示教方法有两种:一种是由操作者用手动控制器示教操纵盒,将。









最新文章
-
![水槽洗碗机清洗干净吗]()
水槽洗碗机清洗干净吗
2026-06-20 11:52:04 -
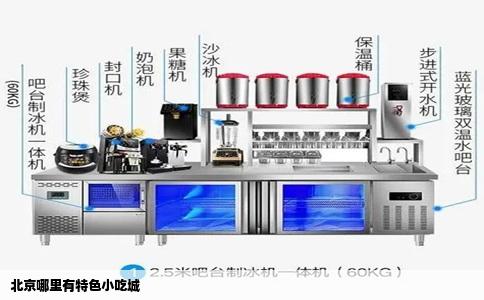
![北京哪里有特色小吃城]()
北京哪里有特色小吃城
2026-06-20 11:43:02 -
![铁板烧和烧烤哪个好]()
铁板烧和烧烤哪个好
2026-06-20 11:36:01 -
![海尔600冰箱化霜功率]()
海尔600冰箱化霜功率
2026-06-20 11:27:01 -
![什么品牌的净水器好用]()
什么品牌的净水器好用
2026-06-20 11:26:05 -
![东贝冰淇淋机使用方法是什么]()
东贝冰淇淋机使用方法是什么
2026-06-20 11:24:02 -
![求冬天热饮的做法要实际的]()
求冬天热饮的做法要实际的
2026-06-20 11:23:04 -
![橱柜改造成加净水器和洗碗机可能么]()
橱柜改造成加净水器和洗碗机可能么
2026-06-20 11:11:02